Project Title & Role: Lower-Limb Exoskeleton (EXED) — Lead Designer & Systems Engineer
Problem Statement: Elderly and arthritic individuals struggle with daily mobility tasks (walking, climbing stairs). Affordable assistive exoskeletons were limited.
My Solution:
Secured ₹1,00,000 Innovation Grant to design an assistive exoskeleton.
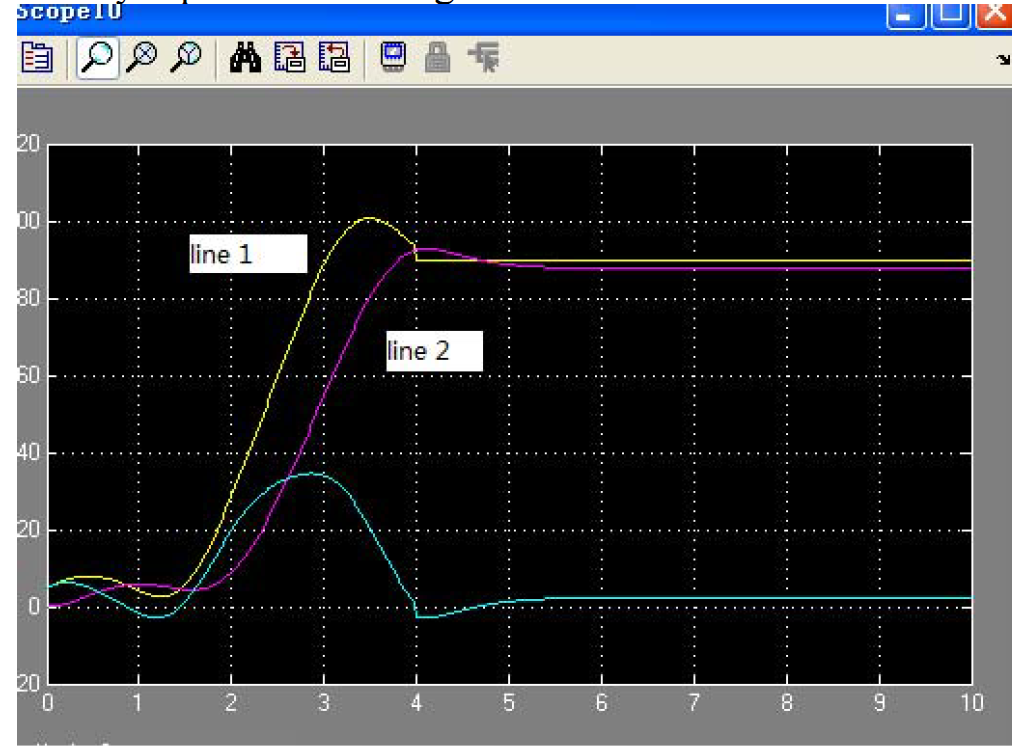
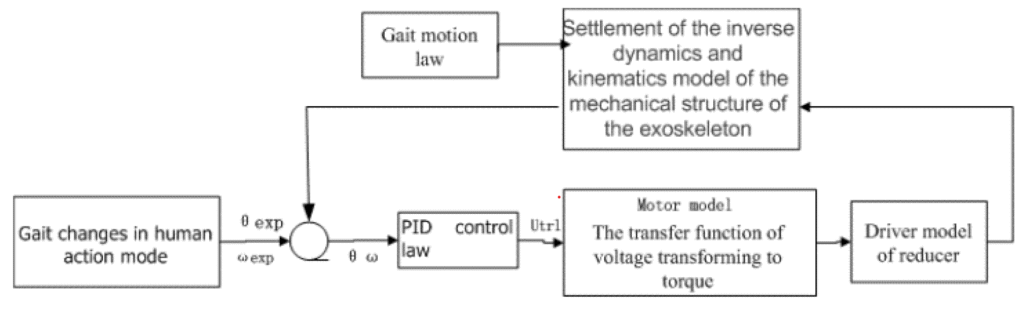
Used high-torque wiper motors for hip/knee actuation, Arduino control, and L293D drivers.
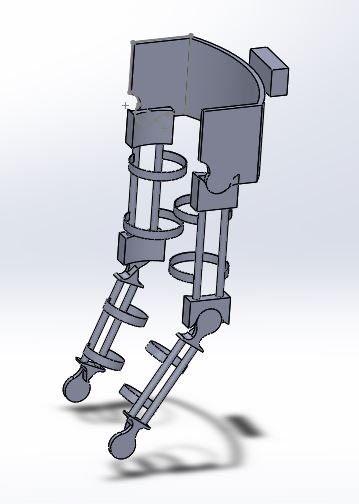
Designed SS304/AISI 4130 frame with ergonomic supports.
Conducted FEA (ANSYS) for joint stresses and torque validation.
Key Deliverables/Outcomes:
Working prototype demonstrated assisted gait under lab conditions.
Published research at MULTICON 2020.
Strengthened cross-domain skills in mechanics, control, and human-factors prototyping.