A
M
O
G
H
G
U
P
T
A
Loading
- Project Title & Role:
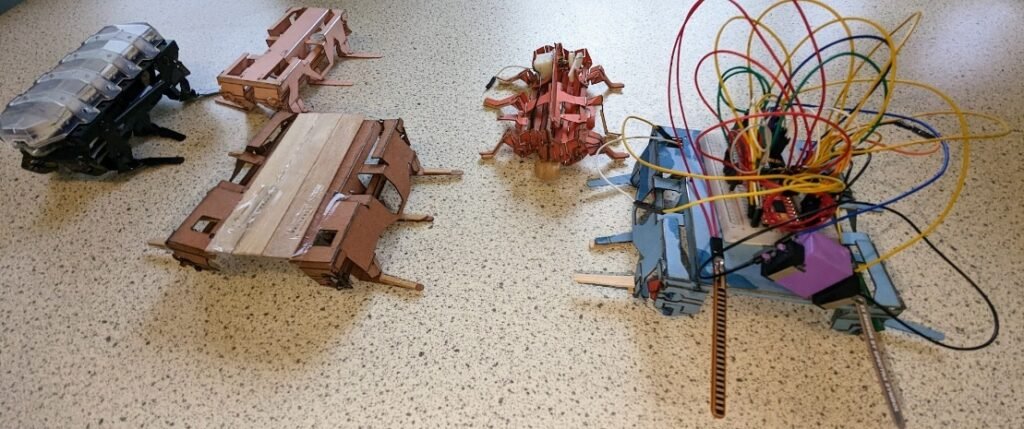
Autonomous Tank Robot — Lead Design Engineer - Problem Statement:
Design a mobile robot for competition, capable of autonomous navigation, target detection, and projectile firing. - My Solution:
- Tracked chassis for stability on mixed terrain.
- Developed Scotch-yoke + flywheel firing mechanism for precision shots.
- Implemented obstacle avoidance and targeting algorithms in C++/Python.
- Validated ~80% shot accuracy in field trials.
- Key Deliverables/Outcomes:
- Fully functional autonomous robot with reliable targeting and navigation.
- Strengthened expertise in mechanism–software integration.
- Achieved competition readiness under strict time constraints.
- Visuals:
- CAD of firing module.
- Robot chassis photo.
- Accuracy test plots.